Хранилища данных - статьи
Управление плохо формализуемыми объектами
До настоящего времени модель адаптивного управления рассматривалась разработчиками в основном для управления физическими процессами. Этот подход строится на предположении, что можно получить точную форму передаточной функции, отображающей множество входных параметров во множество выходных параметров управляемого объекта. Областью применения таких методов управления являются хорошо формализуемые, то есть сравнительно простые объекты управления с очевидными свойствами. На практике же типичными являются объекты управления, которые плохо формализуются, свойства которых априори плохо известны или изменяются в процессе функционирования,. Попытки аналитически описать их свойства быстро приводят к катастрофическому усложнению математических моделей.
В ситуации, когда известных параметров ОУ и окружающей среды недостаточно для полного и однозначного определения его поведения, нельзя принимать решение об управляющем воздействии на объект, зная только его входные параметры. Мы будем ближе к знанию поведения объекта, когда управление будет осуществляться не по его параметрам, а по его состояниям. Если удается сформировать на основе априорной информации обобщенные, или агрегированные образы - классы состояний ОУ с известной реакцией объекта каждого класса, то управляющее воздействие можно рассматривать как отображение ОУ из класса в класс (в том числе - в исходный класс).
Разобьем состояния ОУ на группы, состояния в каждой из которых эквивалентны друг другу с точки зрения управления, и назовем их классами состояний объекта (рис. 4).
Иногда цель управления состоит в том чтобы достичь или удержать объект в определенном состоянии. Но понятие цели не всегда может отождествляться с конкретным состоянием или классом состояний. Целью может быть управляемое поведение, учитывающее переходы объекта из одного класса состояний в другой. Так, при лечении хронических заболеваний задача восстановления больного органа невыполнима, потому при заболевании с той или иной скоростью происходит процесс дегенерации рабочей ткани (мы сейчас не рассматриваем вопросы пересадки органов).
Целью управления можно считать стремление замедлить процесс уменьшения рабочей ткани (как можно дольше удерживать ОУ в текущем классе).
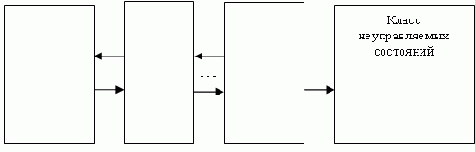
Рис. 4. Упрощенный вид переходов объекта управления.
Казалось бы, эту цель можно заменить более простой - естественным желанием удержать больного в определенной стадии заболевания. Однако, зная, что процесс все равно идет, даже в латентном состоянии (латентное - без заметных признаков заболевания), ставить такую цель - значит обманывать себя. В этом случае управление будет считаться заведомо неудачным. Если же процесс был растянут на достаточно большой (для данного заболевания) срок, значит, цель управления достигнута.
Другой пример - управление велосипедом-роботом. Здесь цель - не только удержать равновесие, но и покрыть некоторое расстояние из одного пункта в другой. Исходным классом можно считать начальный пункт вместе с параметрами объекта, в которые входят угол наклона велосипеда и скорость, а целевым классом - конечный пункт с таким же набором параметров.
Поэтому, говоря о цели, мы имеем в виду не только состояние, но, прежде всего оптимальное, с нашей точки зрения, поведение объекта, включающее в себя и состояния. Таким образом, управляющее воздействие определяется нами как воздействие на объект с целью достижения оптимального или близкого к нему поведения.
При таком подходе поведение ОУ, как при наличии управляющего воздействия, так и без него, представляет собой дискретный процесс, каждый шаг которого, в общем случае, - это переход объекта из одного класса состояний в другой.
Следует заранее оговориться, что множество классов состояний объекта не обязательно должно быть упорядоченным, поэтому переход из класса в класс не всегда есть приближение на шаг к цели или отдаление от нее. Формализация такого понятия и возможность упорядочения классов состояний, конечно, во многом зависит от конкретного приложения.
При отсутствии управления (или в случае управления, не приводящего к цели) объект может попасть в режим, в котором дальнейшее управление становится невозможным или бессмысленным.Это может быть как одно состояние, так и множество состояний. С точки зрения управления, они все образуют класс эквивалентности. Назовем его классом неуправляемых состояний.
Сущность предлагаемой модели управления заключается в следующем. Наши знания об объекте управления и о среде, в которой он функционирует, являются неопределенными. Известна лишь принадлежность объекта к некоторому классу состояний. Цель - достижение оптимального поведения объекта, выражающегося в виде последовательности определенных классов состояний. Необходимо найти алгоритм управления (адаптивный регулятор), обеспечивающий достижение цели за конечное число управляющих воздействий.
